NASA’s Next Space Robot Was Inspired by a Baby’s Toy
Meet the Super Ball Bot, a flexible robot that could explore new planets
/https://tf-cmsv2-smithsonianmag-media.s3.amazonaws.com/accounts/headshot/erin.png)
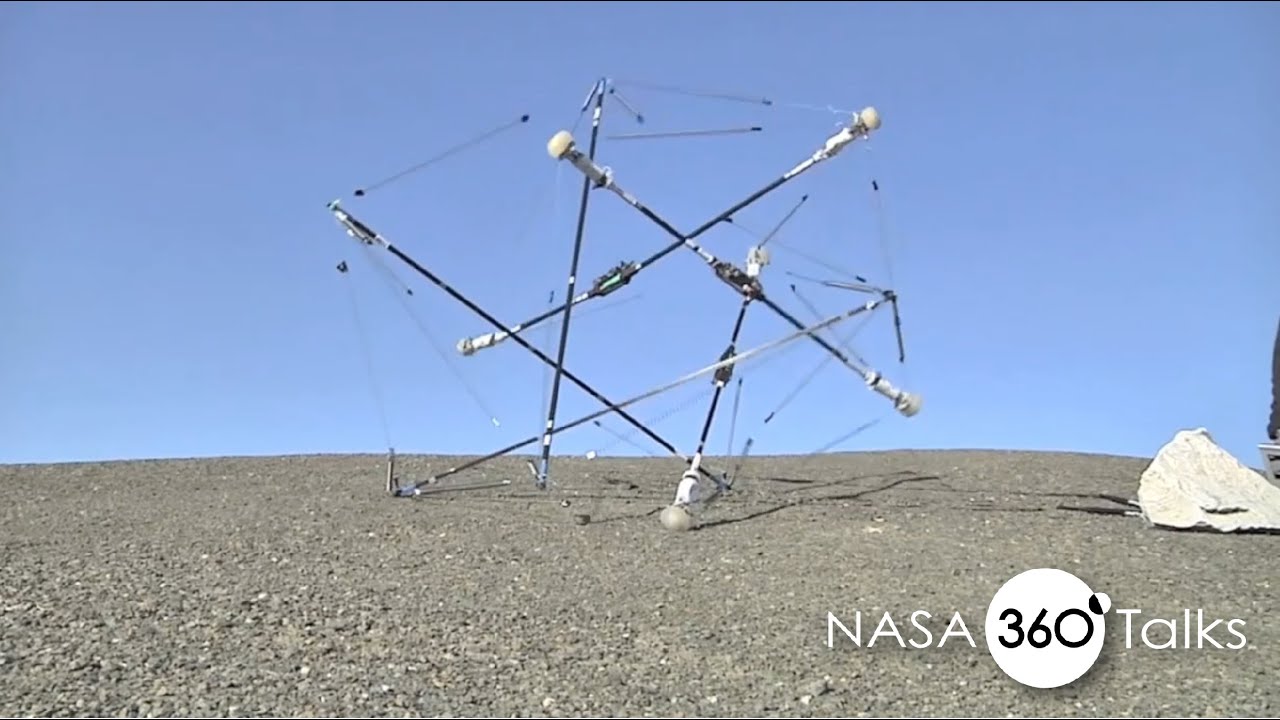
NASA’s next space robot doesn't look much like the wheeled or four-legged or humanoid robots that generations of science fiction have dreamed up. More than anything else, it looks like an abstract, geometric structure. But this amalgam of lines could explore new planets, expanding, contracting and lurching along new terrain. It’s called the Super Ball Bot, and it has its origins in a humble baby’s toy.
Wired reports that two engineers from NASA’s Innovative Advanced Concepts Program were tossing around a baby toy made of wire and rods when they noticed it absorbed impact well when it hit the floor. Though they jokingly compared it to a landing robot at first, Vyat SunSpiral and Adrian Agogino soon realized that there was an intriguing principle at play—a concept known as tensegrity.
The term was coined by Buckminster Fuller, who studied the relationship between tension and structural integrity. (Most famously, perhaps, with his geodesic domes.) The concept can be found in nature, too, from cellular structures to spider webs. NASA calls tensegrity structures “counter-intuitive”—built with seemingly-fragile components, they are able to distribute tension and compression across the entire structure.
Inspired by tensegrity, SunSpiral and Agogino developed a robot that’s easily manipulated and that can squeeze into tight places. Unlike other space-exploring robots, the Super Ball Bot is lightweight. What it lacks in rigidity, SunSpiral tells Wired, it makes up for in terms of flexibility.
“We’re accustomed to building rigid and linearly connected systems,” SunSpiral explains. “And we don’t have as many computational tools to develop tensegrity systems. [Super Ball Bot] breaks so many rules of conventional engineering.”
The engineers will present their concept at the IEEE International Conference on Robotics and Automation this spring. But the breakthrough won’t be the first time science has been furthered by a bit of play—from Legos to balloons and kites, scientific discoverers have long found inspiration in toys.
/https://tf-cmsv2-smithsonianmag-media.s3.amazonaws.com/accounts/headshot/erin.png)