How to Land on an Alien World
Like explorers of old, planetary probes go where there may be dragons.
/https://tf-cmsv2-smithsonianmag-media.s3.amazonaws.com/filer/07/80/0780aa73-fc56-40e8-b466-677a9b231504/06c_am2021_penitentesiceformations_live.jpg)
Just as ancient cartographers filled the uncharted edges of their seafaring maps with drawings of sea monsters and dragons, modern designers of vehicles traveling to other planets confront a legion of hazards, both imagined and real. During the earliest days of space exploration, NASA briefly worried that the Apollo landers might sink beneath lunar dust like quicksand. As we push farther out into the solar system and explore more fantastical worlds, the potential threats have likewise become more exotic, from huge icy spikes on Europa to massive ocean waves on Titan.
The surfaces and atmospheres of other worlds present conditions that are not fully known and that may be difficult or impossible to replicate in the laboratory. I’ve spent three decades attempting to anticipate those hazards in order to build protections into the design and operations of spacecraft about to be dispatched across the solar system. Even if we knew the planetary environments perfectly (and if we did, why would we go?) and it were physically possible to test our hardware in those environments on Earth (usually we cannot—even if we get the pressure and temperature right, we can’t match gravity easily), on most projects, we simply cannot afford the time or money.
So one must pick one’s battles. Some aspects really do need to be tested, but other concerns can perhaps be retired by analysis or analogy. And because so many risks are only perceived ones, building confidence in a mission is often a challenge of communication—as much an art as a science. Inevitably, in planetary exploration, some risks are real, and we decide to accept them.
“We can’t guess, we can’t engineer, we can’t develop perfectly every time,” Buzz Aldrin once said, speaking for all of us in planetary exploration. “We do everything we can, but you can’t guarantee. You might as well just not do anything.”
Drowning in Moondust
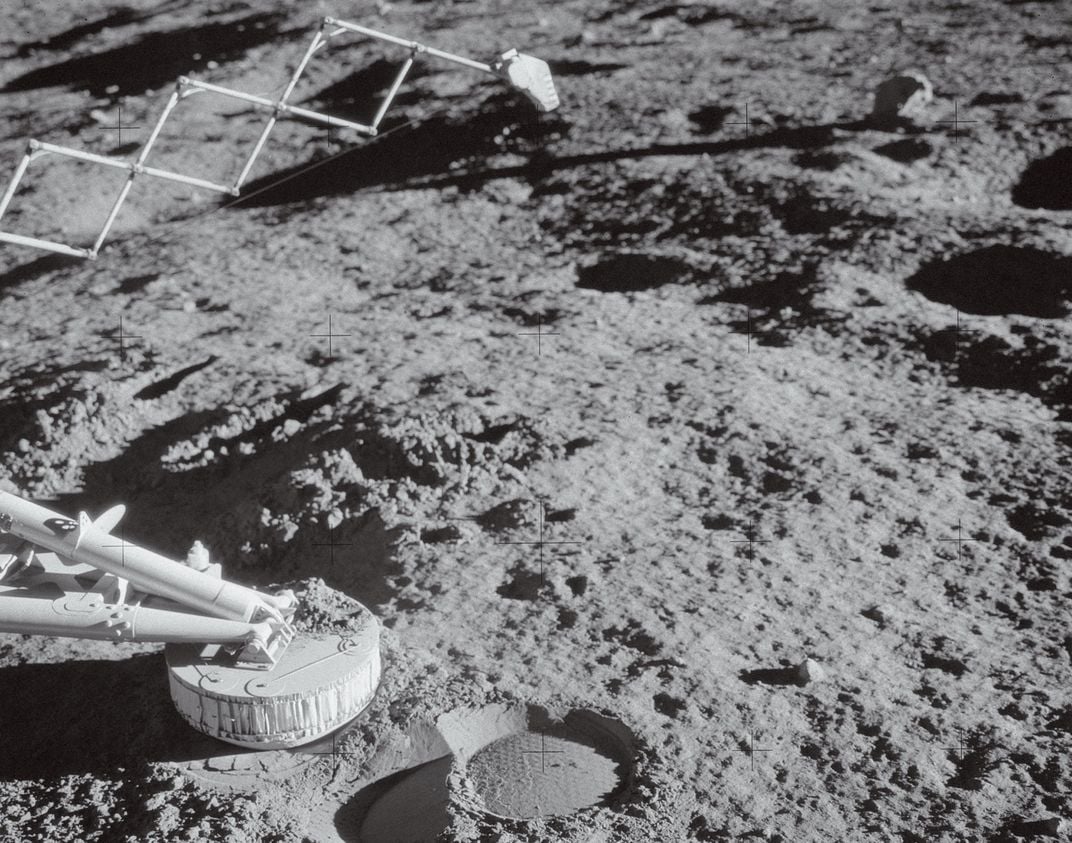
President John F. Kennedy declared that America would land a man on the moon before the end of the decade. But to do that, someone first had to figure out how big the feet on the lunar landing craft would have to be. A prominent Cornell astrophysicist, Thomas Gold, argued that the surfaces of the lunar seas could be thick layers of very fluffy fine dust, which might not bear the weight of a lander but might instead allow it to sink without a trace.
Geologists looking at the mountains and craters on the moon found this scenario hard to accept, but telescopic measurements of the rapid cooling of the lunar surface during an eclipse did show a reason for concern about the lunar surface: The measurements indicated that at least the uppermost layer, millimeters deep, was fluffy. That grain of truth in Gold’s scenario meant it perhaps received more attention than it should have. Years later, spacecraft designer Caldwell Johnson recalled a meeting when engineer Owen Maynard finally declared, in exasperation, “It’s got to be like Arizona! The moon has just got to be like Arizona! Can’t be nothin’ else. So let’s design a landing gear like it was.”
Fortunately, a whole series of unmanned lander missions that preceded Apollo, the lunar Surveyors, provided reassurance that the moon’s surface wouldn’t swallow the astronauts, and confirmed the validity of the surface specification to which Apollo’s landing gear had already been designed.
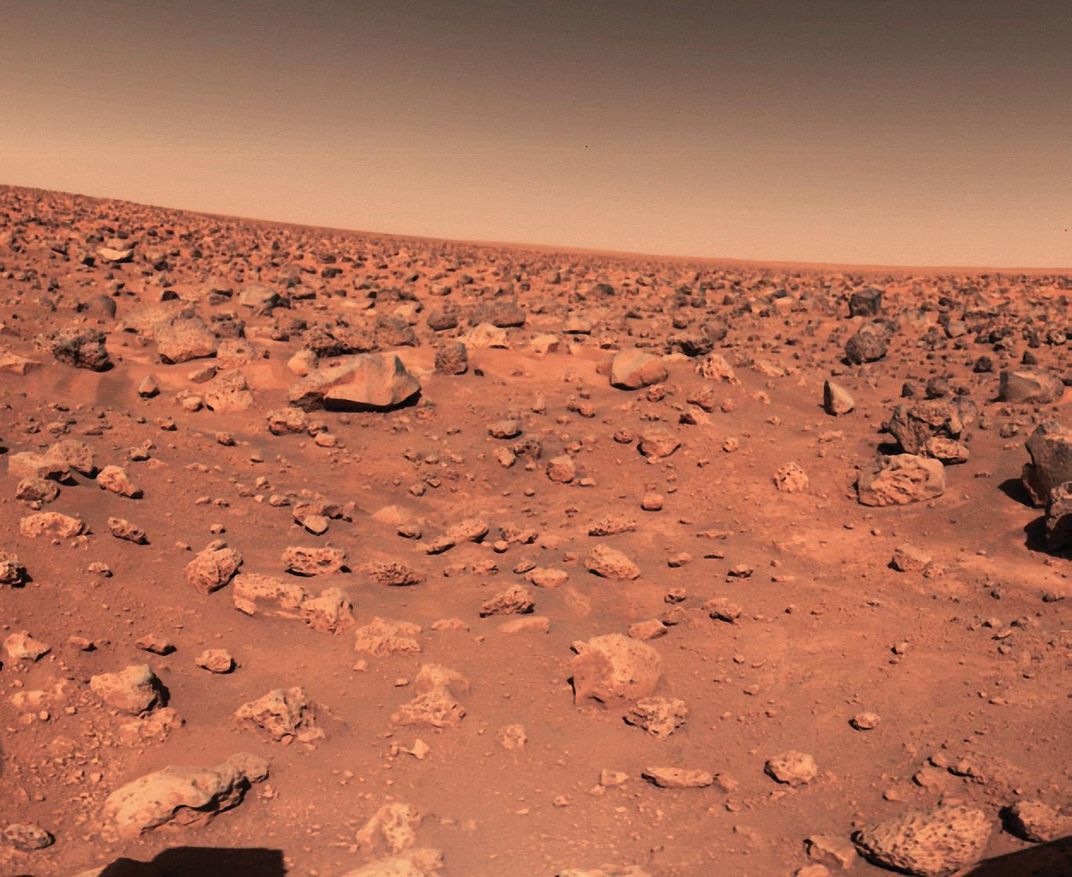
Much the same considerations about hazardous terrain dominated the selection of the Viking landing sites on Mars. Both landers were mated to orbiters, affording NASA the ability to examine potential landing sites up close. Originally, the first Viking was supposed to land on July 4, 1976 (it even had a special Bicentennial logo). The more the Viking geologists saw of the landscape with the orbiters’ cameras, however, the more the sites selected on the basis of earlier missions’ images (with lower resolution) looked frightening. They saw what appeared to be heavily cratered or heavily mantled (sand-covered) landscapes. But even the Viking orbiter images had resolutions of only 100 meters, so only the large-scale characteristics of the landscape could be seen.
A new technique was brought to bear: radar. The character of radio signals beamed from Earth all the way to Mars and bounced back by the surface indicated the roughness of the surface at the scale of the wavelength (about 10 centimeters), very relevant for landing safety. If the lander were to straddle a rock only 50 centimeters in diameter, its belly could be crushed, or if one footpad were perched on such a large rock, the tilt could prevent the lander from digging samples or pointing its antenna properly.
But the bearers of these data were electrical engineers who described their findings in mathematical terms that were obscure and unfamiliar to the geologists, and so the radar data may not have been accorded the weight it deserved. Even the best synthesis of all the data would still be something of a guess. Fortunately, Viking 1 landed safely, 16 days after the Bicentennial. Viking 2 also landed safely, albeit with one footpad perched on a rock (and the Viking 1 images showed a lander-killing rock just a few meters away).
Waves on Titan
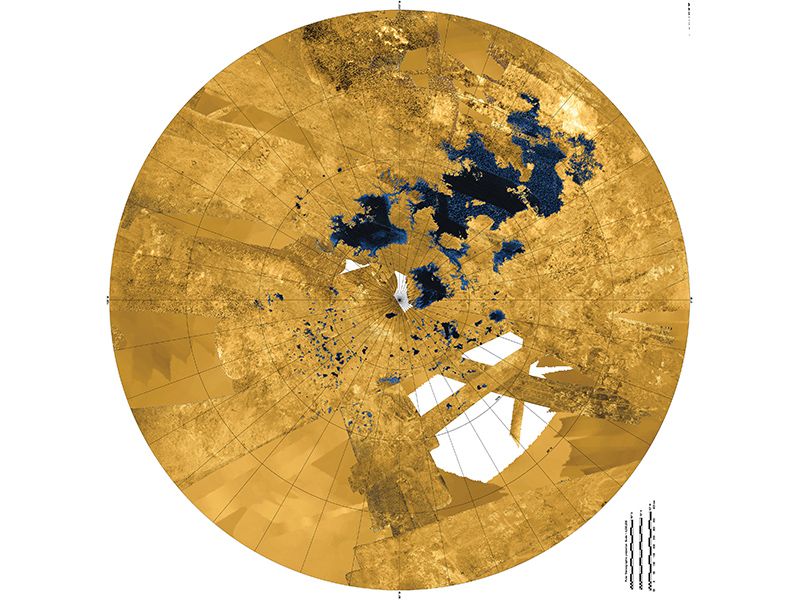
The NASA/ESA Cassini-Huygens mission revealed Saturn’s moon Titan to be a world adorned by lakes and seas composed of liquid methane. In 2010, a team led by Ellen Stofan (now the John and Adrienne Mars Director of the National Air and Space Museum) proposed a follow-up mission that would send a capsule splashing down in the best-mapped of Titan’s northern polar seas, Ligeia Mare, some 400 kilometers across.
This capsule, effectively a buoy, would drift in the currents and winds across this sea of liquified natural gas, measuring its composition and depth with a sonar and recording weather data to understand how this exotic atmosphere and ocean interact. As one might expect, spacecraft engineers typically have little familiarity with sonars, but the Johns Hopkins Applied Physics Laboratory (where I work) that was responsible for managing the project fortunately also does extensive work for the U.S. Navy, so there were sonar experts we could draw on.
The capsule would send its data directly back to Earth, something possible only during the northern summer season on Titan when the sun and Earth are well above the horizon as seen from Ligeia Mare. This would require a small antenna to stay locked on to the Earth, while the capsule bobbed and rocked in the waves. In principle, this is not a difficult thing to do—cruise ships provide satellite TV with a similar technique—but an assessment of how agile the motors on the antenna-pointing gimbal should be would first require an evaluation of how much the capsule would be moving. How big would the waves be, with what period?
The first step, of course, is to estimate the wind speed, and we had computer models of the atmospheric circulation on Titan. A single model could have provided inaccurate data, but we looked at four independent ones. Although they differed in seasonal timing and wind direction, they at least all agreed on the range of wind speed, with a maximum of one meter per second.
Then there is the relationship of the average wind speed to the average wave height. Here, the empirical terrestrial relationships needed to be modified—for instance, Titan’s atmosphere is denser than air on Earth, and that density makes it easier to grow waves. But Titan’s gravity is lower than that on Earth. In the lower gravity, waves grow larger, but move more slowly for a given size. Taking these factors into account, we determined that the average wave height for wind blowing at one meter per second would be a gentle 0.2-meter swell. But not all waves are equal. The random superposition of waves from different directions yields a statistical distribution, with perhaps one wave in a thousand being double the average height, for example. Since our expected mission was six Titan days (90 Earth days, or about two million wave periods), our statistical calculations indicated that we were 99 percent sure not to encounter a wave bigger than four times the average.
There was an interesting wrinkle in all this, in that (as many boaters will know) the capsule would have, like many dynamical systems, a characteristic rocking period. This meant that the worst rocking angles and speeds were not actually those associated with the strongest winds. Even though these produced the biggest waves, the big waves were slower; whereas, an intermediate wind gave shorter-period waves. And while these waves were smaller in amplitude, they resonated with the capsule motion, causing greater rocking. This analysis determined how fast the antenna-pointing motors would have to be in order to maintain contact with Earth.
Ultimately, NASA chose the InSight mission to study the interior of Mars instead of a buoy for Titan’s seas. Although there were hopes that we might re-propose this mission later in the 2010s, we found that, by the time the spacecraft reached Titan in the late 2020s, northern summer would be over and direct-to-Earth communication from the seas would be impossible.
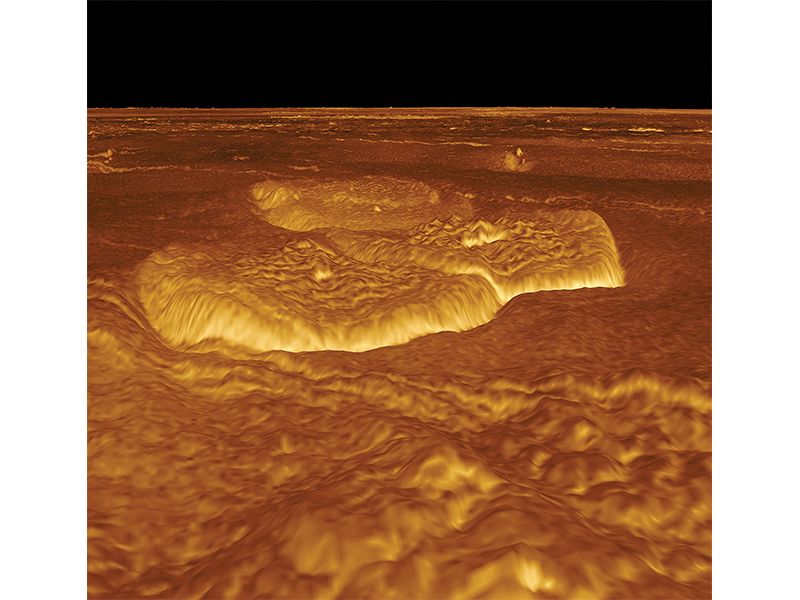
Cooking on Venus
Four years later, I found myself explaining to a review panel the hazards of Venus, where we hoped to send a probe called DaVinci to measure Venus’ atmosphere and image its surface as it descended. The last (and only) U.S. mission to reach the surface of our sister planet was Pioneer Venus, over four decades ago. That mission comprised an orbiter and four probes that descended into the hellish depths of the atmosphere. Although the probes functioned well overall, during the descent, their external sensors (notably, temperature sensors) all failed mysteriously at the same altitude: about 12 kilometers. Speculations at the time included some sort of electrical discharge, but such an effect seems an improbable coincidence for vehicles that were thousands of kilometers apart.
The acknowledgment and ultimate diagnosis of errors is often slow and without fanfare, especially when careers might be at stake. It was 12 years after Pioneer Venus that a workshop was finally convened to shake out what had happened. It seems, from the discretely published proceedings of that workshop, that while the Kapton tape for the wiring on the sensors had been tested for compatibility with the high temperature of the Venus atmosphere, Kynar shrink tubing was used as well to reinforce some wire joints. When this tubing was cooked above 600 Kelvin (327 Centigrade), it gave off corrosive hydrogen fluoride fumes, which attacked the Kapton, allowing the sensors to be shorted out. An innocent improvement caused an unanticipated vulnerability.
Careful attention to materials selection will avoid this issue—and, indeed, the Soviet VEGA-2 probe’s sensors survived their landing on Venus in 1985.
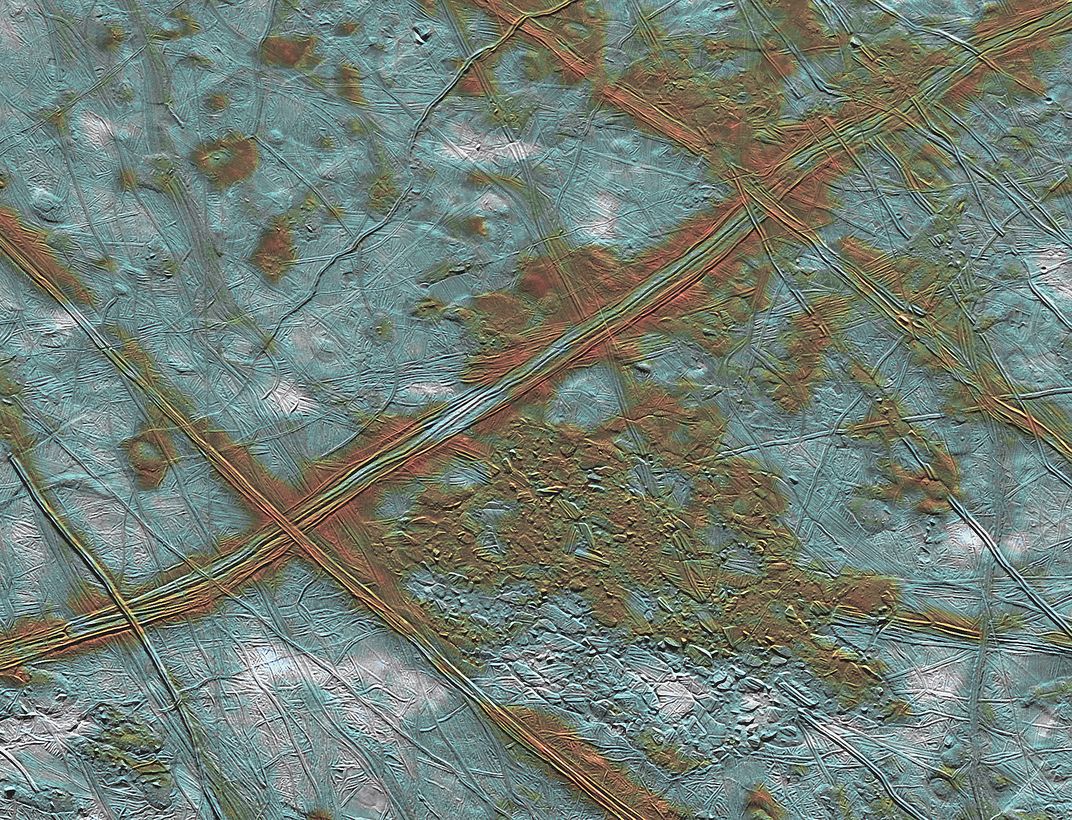
Europa—Deadly Spikes of Ice
Jupiter’s icy moon Europa is believed to have a global ocean some 100 kilometers deep, beneath a crust of ice about 15 kilometers thick. Although it is far from clear that life could emerge in such an environment, it is plausible. But do we know enough about the surface of Europa to design a lander? The best images we have from the Galileo probe show a rough surface, but these cover only a tiny fraction of the moon. So we are forced again to consider the processes that shape the surface and create potential hazards.
As anyone who has dealt with “freezer-burned” food knows, ice can migrate even well below the melting point. The process of evaporation and recondensation can take place in a vacuum—such as on Europa’s surface—as well as in air, and will transfer ice from sun-facing surfaces to those which are colder. Imperfections in a flat surface can grow by this transport of ice, and glaciers on Earth often develop a “cupped” surface as a result. But the process can proceed to an extreme, forming fearsome spikes of ice four and a half meters high in some sites in the Andes mountains. These spikes are called “penitents” because they resemble the white hoods of penance-serving worshippers. They also look like a spacecraft designer’s worst nightmare.
Mathematical models of solid ice evaporating on Europa show that penitents could theoretically form, but that doesn’t mean that they do. And, if they were to form, would they occupy a fraction of the surface large enough to pose a threat to a lander? Consider the question from a different vantage point: Penitents form in certain sites on Earth, but would an alien spacecraft designer factor them in? It may be that radar can come to the rescue, in that conical spikes should be efficient at absorbing energy by multiple reflections, like the walls of anechoic chambers used for acoustic testing. Radar measurements and other data from NASA’s Europa Clipper mission, scheduled for launch in 2024, might help put the matter to rest once and for all.
Three years after that mission, NASA will finally begin its return to Titan when it launches the Dragonfly mission (see “In the Skies Over Titan,” September 2020). You might well imagine that flying an octocopter on another world brings its fair share of “what ifs,” and I am part of the team that is methodically confronting candidate risks, such as quicksand, or lightning, and dust devils, identifying the likelihood and consequence for each.
Our maps are no longer covered with dragons, but unknown hazards remain frightening prospects for mission planners tasked with sending multi-billion-dollar spacecraft to alien worlds millions of miles away. It will continue to be my job to figure out how big those real-life “dragons” really are and whether they need slaying. It’s an interesting way to make a living.
Ralph Lorenz is a planetary scientist and engineer who works on NASA, European, and Japanes space projects to explore worlds from Venus to Titan.

Subscribe to Air & Space Magazine Now
This story is a selection from the April/May issue of Air & Space magazine